Исчерпывающий гид (2020). Координаты и векторы
Прямоугольная система координат
Чтобы определить понятие координат точек, нам необходимо ввести систему координат, в которой мы и будем определять ее координаты. Одна и та же точка в разных системах координат может иметь различные координаты. Здесь мы будем рассматривать прямоугольную систему координат в пространстве.
Возьмем в пространстве точку $O$ и введем для нее координаты $(0,0,0)$. Назовем ее началом системы координат. Проведем через нее три взаимно перпендикулярные оси $Ox$, $Oy$ и $Oz$, как на рисунке 1. Эти оси будут называться осями абсцисс, ординат и аппликат, соответственно. Осталось только ввести масштаб на осях (единичный отрезок) – прямоугольная система координат в пространстве готова (рис. 1)
Рисунок 1. Прямоугольная система координат в пространстве. Автор24 - интернет-биржа студенческих работ
Координаты точки
Теперь разберем, как определяют в такой системе координаты любой точки. Возьмем произвольную точку $M$ (рис. 2).
Построим на координатных осях прямоугольный параллелепипед, так, что точки $O$ и $M$ противоположные его вершины (рис. 3).
Рисунок 3. Построение прямоугольного параллелепипеда. Автор24 - интернет-биржа студенческих работ
Тогда точка $M$ будет иметь координаты $(X,Y,Z)$, где $X$ – значение на числовой оси $Ox$, $Y$ – значение на числовой оси $Oy$, а $Z$ – значение на числовой оси $Oz$.
Пример 1
Необходимо найти решение следующей задачи: написать координаты вершин параллелепипеда, изображенного на рисунке 4.
Решение .
Точка $O$ начало координат, следовательно, $O=(0,0,0)$.
Точки $Q$, $N$ и $R$ лежат на осях $Ox$, $Oz$ и $Oy$, соответственно, значит
$Q=(2,0,0)$, $N=(0,0,1.5)$, $R=(0,2.5,0)$
Точки $S$, $L$ и $M$ лежат в плоскостях $Oxz$, $Oxy$ и $Oyz$, соответственно, значит
$S=(2,0,1.5)$, $L=(2,2.5,0)$, $R=(0,2.5,1.5)$
Точка $P$ имеет координаты $P=(2,2.5,1.5)$
Координаты вектора по двум точкам и формула нахождения
Чтобы узнать, как найти вектор по координатам двух точек, необходимо рассмотреть введенную нами ранее систему координат. В ней от точки $O$ по направлению оси $Ox$ отложим единичный вектор $\overline{i}$, по направлению оси $Oy$ - единичный вектор $\overline{j}$, а единичный вектор $\overline{k}$ нужно направлять по оси $Oz$.
Для того чтобы ввести понятие координат вектора, введем следующую теорему (здесь ее доказательство мы рассматривать не будем).
Теорема 1
Произвольный вектор в пространстве может быть разложен по трем любым векторам, которые не лежат в одной плоскости, причем коэффициенты в таком разложении будут единственным образом определены.
Математически это выглядит следующим образом:
$\overline{δ}=m\overline{α}+n\overline{β}+l\overline{γ}$
Так как векторы $\overline{i}$, $\overline{j}$ и $\overline{k}$ построены на координатных осях прямоугольной системы координат, то они, очевидно, не будут принадлежать одной плоскости. Значит любой вектор $\overline{δ}$ в этой системе координат, по теореме 1, может принимать следующий вид
$\overline{δ}=m\overline{i}+n\overline{j}+l\overline{k}$ (1)
где $n,m,l∈R$.
Определение 1
Три вектора $\overline{i}$, $\overline{j}$ и $\overline{k}$ будут называться координатными векторами.
Определение 2
Коэффициенты перед векторами $\overline{i}$, $\overline{j}$ и $\overline{k}$ в разложении (1) будут называться координатами этого вектора в заданной нами системе координат, то есть
$\overline{δ}=(m,n,l)$
Линейные операции над векторами
Теорема 2
Теорема о сумме: Координаты суммы любого числа векторов определяются суммой их соответствующих координат.
Доказательство .
Будем доказывать эту теорему для 2-х векторов. Для 3-х и более векторов доказательство строится аналогичным образом. Пусть $\overline{α}=(α_1,α_2,α_3)$, $\overline{β}=(β_1,β_2 ,β_3)$.
Эти вектора можно записать следующим образом
$\overline{α}=α_1\overline{i}+ α_2\overline{j}+α_3\overline{k}$, $\overline{β}=β_1\overline{i}+ β_2\overline{j}+β_3\overline{k}$
В статье ниже будут освещены вопросы нахождения координат середины отрезка при наличии в качестве исходных данных координат его крайних точек. Но, прежде чем приступить к изучению вопроса, введем ряд определений.
Определение 1
Отрезок – прямая линия, соединяющая две произвольные точки, называемые концами отрезка. В качестве примера пусть это будут точки A и B и соответственно отрезок A B .
Если отрезок A B продолжить в обе стороны от точек A и B , мы получим прямую A B . Тогда отрезок A B – часть полученной прямой, ограниченный точками A и B . Отрезок A B объединяет точки A и B , являющиеся его концами, а также множество точек, лежащих между. Если, к примеру, взять любую произвольную точку K , лежащую между точками A и B , можно сказать, что точка K лежит на отрезке A B .
Определение 2
Длина отрезка – расстояние между концами отрезка при заданном масштабе (отрезке единичной длины). Длину отрезка A B обозначим следующим образом: A B .
Определение 3
Середина отрезка – точка, лежащая на отрезке и равноудаленная от его концов. Если середину отрезка A B обозначить точкой C , то верным будет равенство: A C = C B
Исходные данные: координатная прямая O x и несовпадающие точки на ней: A и B . Этим точкам соответствуют действительные числа x A и x B . Точка C – середина отрезка A B: необходимо определить координату x C .
Поскольку точка C является серединой отрезка А В, верным будет являться равенство: | А С | = | С В | . Расстояние между точками определяется модулем разницы их координат, т.е.
| А С | = | С В | ⇔ x C - x A = x B - x C
Тогда возможно два равенства: x C - x A = x B - x C и x C - x A = - (x B - x C)
Из первого равенства выведем формулу для координаты точки C: x C = x A + x B 2 (полусумма координат концов отрезка).
Из второго равенста получим: x A = x B , что невозможно, т.к. в исходных данных - несовпадающие точки. Таким образом, формула для определения координат середины отрезка A B с концами A (x A) и B (x B):
Полученная формула будет основой для определения координат середины отрезка на плоскости или в пространстве.
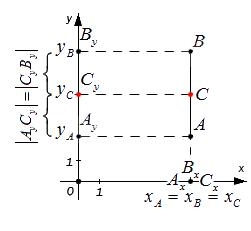
Исходные данные: прямоугольная система координат на плоскости О x y , две произвольные несовпадающие точки с заданными координатами A x A , y A и B x B , y B . Точка C – середина отрезка A B . Необходимо определить координаты x C и y C для точки C .
Возьмем для анализа случай, когда точки A и B не совпадают и не лежат на одной координатной прямой или прямой, перпендикулярной одной из осей. A x , A y ; B x , B y и C x , C y - проекции точек A , B и C на оси координат (прямые О х и О y).

Согласно построению прямые A A x , B B x , C C x параллельны; прямые также параллельны между собой. Совокупно с этим по теореме Фалеса из равенства А С = С В следуют равенства: А x С x = С x В x и А y С y = С y В y , и они в свою очередь свидетельствуют о том, что точка С x – середина отрезка А x В x , а С y – середина отрезка А y В y . И тогда, опираясь на полученную ранее формулу, получим:
x C = x A + x B 2 и y C = y A + y B 2
Этими же формулами можно воспользоваться в случае, когда точки A и B лежат на одной координатной прямой или прямой, перпендикулярной одной из осей. Проводить детальный анализ этого случая не будем, рассмотрим его лишь графически:

Резюмируя все выше сказанное, координаты середины отрезка A B на плоскости с координатами концов A (x A , y A) и B (x B , y B) определяются как :
(x A + x B 2 , y A + y B 2)
Исходные данные: система координат О x y z и две произвольные точки с заданными координатами A (x A , y A , z A) и B (x B , y B , z B) . Необходимо определить координаты точки C , являющейся серединой отрезка A B .
A x , A y , A z ; B x , B y , B z и C x , C y , C z - проекции всех заданных точек на оси системы координат.
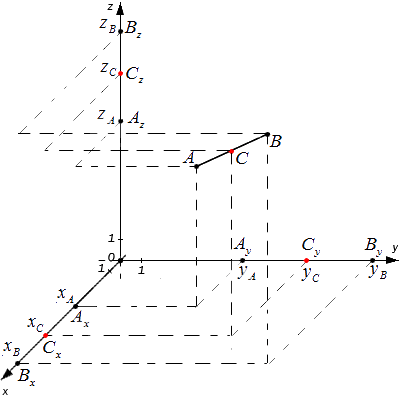
Согласно теореме Фалеса верны равенства: A x C x = C x B x , A y C y = C y B y , A z C z = C z B z
Следовательно, точки C x , C y , C z являются серединами отрезков A x B x , A y B y , A z B z соответственно. Тогда, для определения координат середины отрезка в пространстве верны формулы:
x C = x A + x B 2 , y c = y A + y B 2 , z c = z A + Z B 2
Полученные формулы применимы также в случаях, когда точки A и B лежат на одной из координатных прямых; на прямой, перпендикулярной одной из осей; в одной координатной плоскости или плоскости, перпендикулярной одной из координатных плоскостей.
Определение координат середины отрезка через координаты радиус-векторов его концов
Формулу для нахождения координат середины отрезка также можно вывести согласно алгебраическому толкованию векторов.
Исходные данные: прямоугольная декартова система координат O x y , точки с заданными координатами A (x A , y A) и B (x B , x B) . Точка C – середина отрезка A B .
Согласно геометрическому определению действий над векторами верным будет равенство: O C → = 1 2 · O A → + O B → . Точка C в данном случае – точка пересечения диагоналей параллелограмма, построенного на основе векторов O A → и O B → , т.е. точка середины диагоналей.Координаты радиус-вектора точки равны координатам точки, тогда верны равенства: O A → = (x A , y A) , O B → = (x B , y B) . Выполним некоторые операции над векторами в координатах и получим:
O C → = 1 2 · O A → + O B → = x A + x B 2 , y A + y B 2
Следовательно, точка C имеет координаты:
x A + x B 2 , y A + y B 2
По аналогии определяется формула для нахождения координат середины отрезка в пространстве:
C (x A + x B 2 , y A + y B 2 , z A + z B 2)
Примеры решения задач на нахождение координат середины отрезка
Среди задач, предполагающих использование полученных выше формул, встречаются, как и те, в которых напрямую стоит вопрос рассчитать координаты середины отрезка, так и такие, что предполагают приведение заданных условий к этому вопросу: зачастую используется термин «медиана», ставится целью нахождение координат одного из концов отрезка, а также распространены задачи на симметрию, решение которых в общем также не должно вызывать затруднений после изучения настоящей темы. Рассмотрим характерные примеры.
Пример 1
Исходные данные: на плоскости – точки с заданными координатами А (- 7 , 3) и В (2 , 4) . Необходимо найти координаты середины отрезка А В.
Решение
Обозначим середину отрезка A B точкой C . Координаты ее буду определяться как полусумма координат концов отрезка, т.е. точек A и B .
x C = x A + x B 2 = - 7 + 2 2 = - 5 2 y C = y A + y B 2 = 3 + 4 2 = 7 2
Ответ : координаты середины отрезка А В - 5 2 , 7 2 .
Пример 2
Исходные данные: известны координаты треугольника А В С: А (- 1 , 0) , В (3 , 2) , С (9 , - 8) . Необходимо найти длину медианы А М.
Решение
- По условию задачи A M – медиана, а значит M является точкой середины отрезка B C . В первую очередь найдем координаты середины отрезка B C , т.е. точки M:
x M = x B + x C 2 = 3 + 9 2 = 6 y M = y B + y C 2 = 2 + (- 8) 2 = - 3
- Поскольку теперь нам известны координаты обоих концов медианы (точки A и М), можем воспользоваться формулой для определения расстояния между точками и посчитать длину медианы А М:
A M = (6 - (- 1)) 2 + (- 3 - 0) 2 = 58
Ответ: 58
Пример 3
Исходные данные: в прямоугольной системе координат трехмерного пространства задан параллелепипед A B C D A 1 B 1 C 1 D 1 . Заданы координаты точки C 1 (1 , 1 , 0) , а также определена точка M , являющаяся серединой диагонали B D 1 и имеющая координаты M (4 , 2 , - 4) . Необходимо рассчитать координаты точки А.
Решение
Диагонали параллелепипеда имеют пересечение в одной точке, которая при этом является серединой всех диагоналей. Исходя из этого утверждения, можно иметь в виду, что известная по условиям задачи точка М является серединой отрезка А С 1 . Опираясь на формулу для нахождения координат середины отрезка в пространстве, найдем координаты точки А: x M = x A + x C 1 2 ⇒ x A = 2 · x M - x C 1 = 2 · 4 - 1 + 7 y M = y A + y C 1 2 ⇒ y A = 2 · y M - y C 1 = 2 · 2 - 1 = 3 z M = z A + z C 1 2 ⇒ z A = 2 · z M - z C 1 = 2 · (- 4) - 0 = - 8
Ответ: координаты точки А (7 , 3 , - 8) .
Если вы заметили ошибку в тексте, пожалуйста, выделите её и нажмите Ctrl+Enter
Способы задания прямоугольной системы координат
Как известно, система прямоугольных координат на плоскости может задаваться тремя способами: 1-й способ фиксируется местоположение центра системы - т.O, проводится ось OX и указывается ее положительное направление, перпендикулярно к оси OX проводится ось OY, в соответствии с типом системы (правая или левая) указывается положительное направление оси OY, устанавливается масштаб координат вдоль осей.
При наличии координатных осей для определения координат какой-либо точки C нужно сначала опустить перпендикуляры из этой точки на координатные оси и затем измерить длину этих перпендикуляров; длина перпендикуляра к оси OX равна координате Y, длина перпендикуляра к оси OY координате X точки (рис. 1).
Кроме системы XOY можно использовать систему X"O"Y", получающуюся из системы XOY путем переноса начала координат в точку O" (Xo"=дx, Yo"= дy) и поворота осей координат по часовой стрелке на угол б.
Переход из XOY в X"O"Y" выполняется по формулам :
Для обратного перехода используются формулы :
- 2-й способ проводятся две взаимно перпендикулярные системы параллельных линий; расстояния между линиями одинаковые, считается, что эти линии параллельны осям координат, и у каждой линии подписывается значение соответствущей координаты (получается координатная сетка).
- 3-й способ указываются численные значения координат двух фиксированных точек.
Первый способ является общепринятым; в геодезии этим способом задается зональная система прямоугольных координат Гаусса.
На топографических картах и планах система прямоугольных координат Гаусса задается вторым способом.
На местности система прямоугольных координат задается третьим способом; всегда можно найти несколько геодезических пунктов с известными координатами и определять положение новых точек относительно этих пунктов, выполняя какие-либо измерения.
Три элементарных измерения
На плоскости можно измерять углы и расстояния.
Угол фиксируется тремя точками: одна точка - это вершина угла, а две другие точки фиксируют направления 1-й и 2-й сторон угла. В простейшем случае хотя бы одна точка из трех не имеет координат, то-есть, является определяемой; в общем случае определяемыми могут быть одна точка, две точки или все три.
Расстояние фиксируется двумя точками, и в общем случае определяемыми могут быть одна точка или обе.
В данном разделе рассматривается простейший случай, когда измерение угла или расстояния выполняют для определения координат одной точки. Поскольку при измерении угла определяемая точка может располагаться либо в вершине угла, либо на одной из его сторон, то с нашей точки зрения на плоскости имеют место три разных измерения, которые назовем элементарными.
Измеряется угол в на пункте A с известными координатами X4, Y4 между направлением с известным дирекционным углом бAB и направлением на определяемую точку P (рис. 2).

Дирекционный угол б направления AP получается по формуле
Для прямой линии AP, называемой линией положения точки P, можно написать уравнение в системе XOY :
В этом уравнении X и Y - координаты любой точки прямой, в том числе и точки P, но для нахождения двух координат точки P одного такого уравнения недостаточно.
Измеряется расстояние S от пункта A с известными координатами XA, YA до определяемой точки P. Из курса геометрии известно, что точка P находится на окружности радиуса S, проведенной вокруг точки A, и называемой линией положения точки P (рис. 3). Уравнение окружности имеет вид:
В этом уравнении X и Y - координаты любой точки окружности, в том числе и точки P, но для нахождения двух координат точки одного такого уравнения недостаточно.

Измеряется угол в на определяемой точке P между направлениями на два пункта с известными координатами; это измерение рассматривается в разделе 8.
Координаты X и Y точки P можно найти из совместного решения двух уравнений, поэтому, взяв любую комбинацию из трех измерений по два, получим простейшие способы определения координат точки, назывемые геодезическими засечками: два уравнения типа (2.4) - прямая угловая засечка, два уравнения типа (2.5) - линейная засечка, одно уравнение типа (2.4) и одно уравнение типа (2.5) полярная засечка, два измерения углов на определяемой точке - обратная угловая засечка.
Остальные комбинации измерений называются комбинированными засечками.
Каждое из трех элементарных измерений является инвариантом по отношению к системам координат, что позволяет решать засечки на различных чертежах, определяя положение точки P относительно фиксированных точек A и B графическим способом.
Аналитический способ решения засечек - это вычисление координат определяемой точки. Оно может быть выполнено через решение системы двух уравнений, соответствующих выполненным измерениям, или через решение треугольника, вершинами которого являются два исходных пункта и определяемая точка (этот способ для краткости назовем способом треугольника).
В любом геодезическом построении принято выделять три типа данных: исходные данные (координаты исходных пунктов, дирекционные углы исходных направлений и т.п.); эти данные часто принимаются условно безошибочными, измеряемые элементы; каждый измеренный элемент обычно сопровождается значением средней квадратической ошибки измерения, неизвестные (или определяемые) элементы; эти элементы подлежат нахождению по специально разработанному алгоритму, и их значения получаются с некоторой ошибкой, зависящей от ошибок измерений и геометрии данного построения.
Полярная засечка
В полярной засечке исходными данными являются координаты пункта A и дирекционный угол направления AB (или координаты пункта B), измеряемыми элементами являются горизонтальный угол в (средняя квадратическая ошибка измерения угла mв) и расстояние S (относительная ошибка его измерения mS / S = 1 / T), неизвестные элементы - координаты X, Y точки P (рис. 4).
Исходные данные: XA, YA, бAB
Измеряемые элементы: в, S
Неизвестные элементы: X, Y

Графическое решение. От направления AB отложить транспортиром угол в и провести прямую линию AQ, затем вокруг пункта A провести дугу окружности радиусом S в масштабе чертежа (плана или карты); точка пересечения прямой линии и дуги является искомой точкой P.
Аналитическое решение. Дирекционный угол б линии AР равен:
Запишем уравнения прямой линии AP - формула (4) и окружности радиуса S вокруг пункта A - формула (5):
Для нахождения координат X и Y точки P нужно решить эти два уравнения совместно как систему. Подставим значение (Y - YA) из первого уравнения во второе и вынесем за скобки (X - XA) 2:
(X - XA) 2 * (1 + tg2 б)= S2.
Выражение (1 + tg2б) заменим на 1 / Cos2б и получим:
(X - XA) 2 =S2 * Cos2б, откуда X - XA = S* Cosб.
Подставим это значение в первое уравнение (6) и получим:
Y - YA = S * Sinб.
Разности координат (X - XA) и (Y - YA) принято называть приращениями и обозначать ДX и ДY.
Таким образом, полярная засечка однозначно решается по формулам:

координата триангуляция трилатерация
Прямая геодезическая задача на плоскости
В геодезии есть две стандартные задачи: прямая геодезичеcкая задача на плоскости и обратная геодезическая задача на плоскости.
Прямая геодезическая задача - это вычисление координат X2, Y2 второго пункта, если известны координаты X1, Y1 первого пункта, дирекционный угол б и длина S линии, соединяющей эти пункты. Прямая геодезическая задача является частью полярной засечки, и формулы для ее решения берутся из набора формул (7):
Обратная геодезическая задача на плоскости
Обратная геодезическая задача - это вычисление дирекционного угла б и длины S линии, соединяющей два пункта с известными координатами X1, Y1 и X2, Y2 (рис. 5).

Построим на отрезке 1-2 как на гипотенузе прямоугольный треугольник с катетами, параллельными осям координат. В этом треугольнике гипотенуза равна S, катеты равны приращениям координат точек 1 и 2 (ДX = X2 - X1, ДY = Y2 - Y1), а один из острых углов равен румбу r линии 1-2.
Если Д X 00 и Д Y 00, то решаем треугольник по известным формулам:
Для данного рисунка направление линии 1-2 находится во второй четверти, поэтому на основании (22) находим:
Общий порядок нахождения дирекционного угла линии 1-2 включает две операции: определение номера четверти по знакам приращений координат Д>X и ДY, вычисление б по формулам связи (22) в соответствии с номером четверти.
Контролем правильности вычислений является выполнение равенства:
Если ДX = 0.0, то S = іДYі;
и б = 90o 00" 00» при ДY > 0,
б = 270o 00" 00» при ДY < 0.
Если ДY = 0.0, то S = іДXі
и б = 0o 00" 00» при ДX > 0,
б = 180o 00" 00» при ДX < 0.
Для решения обратной задачи в автоматическом режиме (в программах для ЭВМ) используется другой алгоритм, не содержащий тангенса угла и исключающий возможное деление на ноль:

если ДY => 0o, то б = a,
если ДY < 0o, то б = 360o - a.
Прямая угловая засечка
Сначала рассмотрим так называемый общий случай прямой угловой засечки, когда углы в1 и в2 измеряются на двух пунктах с известными координатами, каждый от своего направления с известным дирекционным углом (рис. 6).

Исходные данные: XA, YA, бAC,
Измеряемые элементы: в 1, в2
Неизвестные элементы: X, Y
Если бAC и бBD не заданы явно, нужно решить обратную геодезическую задачу сначала между пунктами A и C и затем между пунктами B и D.
Графическое решение. От направления AC отложить с помощью транспортира угол в1 и провести прямую линию AP; от направления BD отложить угол в2 и провести прямую линию BP; точка пересечения этих прямых является искомой точкой P.
Аналитическое решение. Приведем алгоритм варианта, соответствующий общему случаю засечки:
вычислить дирекционные углы линий AP и BP
написать два уравнения прямых линий
для линии AP Y - YA= tgб1 * (X - XA), для линии BP Y - YB= tgб2 * (X - XB) (2.16)
решить систему двух уравнений и вычислить неизвестные координаты X и Y:
Частным случаем прямой угловой засечки считают тот случай, когда углы в1 и в2 измерены от направлений AB и BA, причем угол в1 - правый, а угол в2 - левый (в общем случае засечки оба угла - левые) - рис. 7.

Решение прямой угловой засечки методом треугольника соответствует частному случаю засечки. Порядок решения при этом будет такой: решить обратную задачу между пунктами A и B и получить дирекционный угол бAB и длину b линии AB, вычислить угол г при вершине P, называемый углом засечки,
используя теорему синусов для треугольника APB:
вычислить длины сторон AP (S1) и BP (S2), вычислить дирекционные углы б1 и б2:
решить прямую задачу от пункта A к точке P и для контроля - от пункта B к точке P.
Для вычисления координат X и Y в частном случае прямой угловой засечки можно использовать формулы Юнга:

От общего случая прямой угловой засечки нетрудно перейти к частному случаю; для этого нужно сначала решить обратную геодезическую задачу между пунктами A и B и получить дирекционный угол бAB линии AB и затем вычислить углы в треугольнике APB при вершинах A и B
BAP = бAB - (бAC + в1) и ABP = (бBD + в2) - бBA.
Для машинного счета все рассмотренные способы решения прямой угловой засечки по разным причинам неудобны. Один из возможных алгоритмов решения общего случая засечки на ЭВМ предусматривает следующие действия: вычисление дирекционных углов б1 и б2, введение местной системы координат X"O"Y" с началом в пункте A и с осью O"X", направленной вдоль линии AP, и пересчет координат пунктов A и B и дирекционных углов б1 и б2 из системы XOY в систему X"O"Y" (рис. 8):
X"A = 0, Y"A = 0,
(24), запись уравнений линий AP и BP в системе X"O"Y":

и совместное решение этих уравнений:
перевод координат X" и Y" из системы X"O"Y" в систему XOY:
Так как Ctgб2" = - Ctgг и угол засечки г всегда больше 0о, то решение (27) всегда существует.
Линейная засечка
От пункта A с известными координатами XA, YA измерено расстояние S1 до определяемой точки P, а от пункта B с известными координатами XB, YB измерено расстояние S2 до точки P.
Графическое решение. Проведем вокруг пункта A окружность радиусом S1 (в масштабе чертежа), а вокруг пункта B - окружность радиусом S2; точка пересечения окружностей является искомой точкой; задача имеет два решения, так как две окружности пересекаются в двух точках (рис. 9).
Исходные данные: XA, YA, XB, YB,
Измеряемые элементы: S1, S2,
Неизвестные элементы: X, Y.
Аналитическое решение. Рассмотрим два алгоритма аналитического решения, один - для ручного счета (по способу треугольника) и один - для машинного счета.

Алгоритм ручного счета состоит из следующих действий:
решение обратной геодезической задачи между пунктами A и B и получение дирекционного угла бAB и длины b линии AB, вычисление в треугольнике ABP углов в1 и в2 по теореме косинусов:
вычисление угла засечки г
вычисление дирекционных углов сторон AP и BP:
пункт P справа от линии AB
пункт P слева от линии АВ
решение прямых геодезических задач из пункта A на пункт P и из пункта B на пункт P:
1-е решение
2-е решение
Результаты обоих решений должны совпадать.
Алгоритм машинного решения линейной засечки состоит из следующих действий: решение обратной геодезической задачи между пунктами A и B и получение дирекционного угла бAB и длины b линии AB, введение местной системы координат X"O"Y" с началом в точке A и осью O"X", направленной вдоль линии AB, и пересчет координат пунктов A и B из системы XOY в систему X"O"Y":
запись уравнений окружностей в системе X"O"Y":
и совместное решение этих уравнений, которое предусматривает раскрытие скобок во втором уравнении и вычитание второго уравнения из первого:
Если искомая точка находится слева от линии AB, то в формуле (39) берется знак «-», если справа, то «+».
Пересчет координат X" и Y" точки P из системы X"O"Y" в систему XOY по формулам (2):
Обратная угловая засечка
К элементарным измерениям относится и измерение угла в на определяемой точке P между направлениями на два пункта A и B с известными координатами XA, YA и XB, YB (рис. 10). Однако это измерение оказывается теоретически довольно сложным, поэтому рассмотрим его отдельно.
Проведем окружность через три точки A, B и P. Из школьного курса геометрии известно, что угол с вершиной на окружности измеряется половиной дуги, на которую он опирается. Центральный угол, опирающийся на ту же дугу, измеряется всей дугой, следовательно, он будет равен 2в (рис. 10).

Расстояние b между пунктами A и B считается известным, и из прямоугольного треугольника FCB можно найти радиус R окружности:
Уравнение окружности имеет вид:
где XC и YC - координаты центра окружности. Их можно вычислить, решив либо прямую угловую, либо линейную засечку с пунктов A и B на точку C. В уравнении (42) X и Y - координаты любой точки окружности, в том числе и точки P, но для нахождения двух координат точки P одного такого уравнения недостаточно.
Обратной угловой засечкой называют способ определения координат точки P по двум углам в1 и в2, измеренным на определяемой точке P между направлениями на три пункта с известными координатами A, B, C (рис. 11).
Графическое решение. Приведем способ Болотова графического решения обратной угловой засечки. На листе прозрачной бумаги (кальки) нужно построить углы в1 и в2 с общей вершиной P; затем наложить кальку на чертеж и, перемещая ее, добиться, чтобы направления углов на кальке проходили через пункты A, B, C на чертеже; переколоть точку P с кальки на чертеж.
Исходные данные: XA, YA, XB,
Измеряемые элементы: в1, в2.
Неизвестные элементы: X, Y.

Аналитическое решение. Аналитическое решение обратной угловой засечки предусматривает ее разложение на более простые задачи, например, на 2 прямых угловых засечки и одну линейную, или на 3 линейных засечки и т.д. Известно более 10-ти способов аналитического решения, но мы рассмотрим только один - через последовательное решение трех линейных засечек.
Предположим, что положение точки P известно, и проведем две окружности: одну радиусом R1 через точки A, B и P и другую радиусом R2 через точки B, C и P (рис. 11). Радиусы этих окружностей получим по формуле (41):
Если координаты центров окружностей - точек O1 и O2 будут известны, то координаты точки P можно определить по формулам линейной засечки: из точки O1 по расстоянию R1 и из точки O2 - по расстоянию R2.
Координаты центра O1 можно найти по формулам линейной засечки из точек A и B по расстояниям R1, причем из двух решений нужно взять то, которое соответствует величине угла в1: если в1<90o, то точка O1 находится справа от линии AB, если в1>90o, то точка O1 находится слева от линии AB.
Координаты центра O2 находятся по формулам линейной засечки из точек B и C по расстояниям R2, и одно решение из двух возможных выбирается по тому же правилу: если в2<90o, то точка O2 находится справа от линии BC, если в2>90o, то точка O2 находится слева от линии BC.
Задача не имеет решения, если все четыре точки A, B, C и P находятся на одной окружности, так как обе окружности сливаются в одну, и точек их пересечения не существует.
Комбинированные засечки
В рассмотренных способах решения засечек количество измерений принималось теоретически минимальным (два измерения), обеспечивающим получение результата.
На практике для нахождения координат X и Y одной точки, как правило, выполняют не два, а три и более измерений расстояний и углов, причем эти измерения выполняются как на исходных пунктах, так и на определяемых; такие засечки называются комбинированными. Понятно, что в этом случае появляется возможность контроля измерений, и, кроме того, повышается точность решения задачи.
Каждое измерение, вводимое в задачу сверх теоретически минимального количества, называют избыточным; оно порождает одно дополнительное решение. Геодезические засечки без избыточных измерений принято называть однократными, а засечки с избыточными измерениями - многократными.
При наличии избыточных измерений вычисление неизвестных выполняют методом уравнивания. Алгоритмы строгого уравнивания многократных засечек применяются при автоматизированном счете на ЭВМ; для ручного счета используют упрощенные способы уравнивания.
Упрощенный способ уравнивания какой-либо многократной засечки (n измерений) предусматривает сначала формирование и решение всех возможных вариантов независимых однократных засечек (их число равно n-1), а затем - вычисление средних значений координат точки из всех полученных результатов, если они различаются между собой на допустимую величину.
Ошибка положения точки
В одномерном пространстве (на линии) положение точки фиксируется значением одной координаты X, и ошибка положения точки Mp равна средней квадратической ошибке mx этой координаты. Истинное положение точки может находиться в интервале (X - t * mx) - (X + t * mx), то-есть, в обе стороны от значения X; на практике коэффициент t обычно задают равным 2.0 или 2.50.
В двумерном пространстве (на поверхности) положение точки фиксируется значениями двух координат, и ошибка положения точки должна задаваться двумя величинами: направлением и ошибкой положения по этому направлению. Геометрическая фигура, внутри которой находится истинное положение точки, может иметь разную форму; в частном случае, когда ошибка положения точки по всем направлениям одинакова, получается круг радиуса R = Mp.
Положение точки по двум измерениям получается в пересечении двух линий положения. Для измеренного расстояния S линией положения является окружность радиуса S с центром в исходной пункте A (рис. 2.12а); для измеренного угла в с вершиной в исходном пункте A - прямая линия, проведенная под углом в к исходной линии AB (рис. 2.12б).
Вследствие ошибок измерений необходимо ввести понятие «полоса положения». Для расстояния S, измеренного со средней квадратической ошибкой ms - это круговой пояс (кольцо) шириной 2 * ms между двумя окружностями радиусами (S - ms) и (S + ms); для угла в, измеренного с ошибкой mв - это узкий треугольник с вершиной в точке A и углом при вершине 2 * mв. Линия положения точки является осью симметрии полосы положения (рис. 12).

Рис. 12. Линия положения и «полоса положения» точки P: а) для измеренного расстояния, б) для измеренного угла.
Введем понятие «вектор ошибки измерения» и обозначим его через V. Для измеренного расстояния вектор Vs направлен вдоль линии AP (прямо или обратно) и имеет модуль vs = ms; для измеренного угла вектор Vв направлен перпендикулярно линии AP (влево или вправо от нее) и имеет модуль нв = S * mв / с, где S = A * P.
Точка P, находясь на пересечении двух линий положения, является центром 4-угольника положения, образующегося в пересечении двух полос положения (рис. 13).

Рис. 13. 4-угольник положения: а) в линейной засечке, б) в прямой угловой засечке,
Этот элементарный 4-угольник можно считать параллелограммом, так как в пределах него дуги окружностей можно заменить отрезками касательных, а расходящиеся стороны угла - отрезками прямых, параллельных линии положения. Расстояния от точки P до границ 4-угольника неодинаковы, что говорит о различии ошибок положения точки P по разным направлениям.
Линии положения делят 4-угольник положения на 4 равные части, которые назовем параллелограммами ошибок с углами при вершинах г и (180o - г), где г (180o - г) - угол между векторами ошибок V1 и V2. Поскольку высоты параллелограммов ошибок численно равны модулям векторов н1 и н2, то стороны параллелограммов получаются по известным формулам:

По известным сторонам параллелограмма ошибок и углу между ними г (180o - г) можно вычислить длину обоих его диагоналей: короткой - d1 и длинной - d2:

Таким образом, ошибка положения точки по шести направлениям (рис. 14) выражается простыми формулами; для всех остальных направлений формулы будут более сложные.
Для обобщенной характеристики точности определения точки P нужно иметь некоторое усредненное значение ошибки положения точки P, которое можно вычислить: как радиус круга R, площадь которого (р * R2) равна площади параллелограмма положения точки P (4 * a * b * Sinг),
как ошибку положения по «наиболее слабому направлению», совпадающему с направлением длинной диагонали:
как среднее квадратическое из длинной и короткой диагоналей параллелограмма ошибок:
На практике чаще других применяется третий вариант, в котором легко получаются формулы для оценки точности любой однократной засечки:
полярная засечка (рис. 4):

прямая угловая засечка (рис. 6, 7):

линейная засечка (рис. 9):

обратная угловая засечка (рис. 11).
В этой засечке правая часть формулы ошибки положения точки P должна содержать три слагаемых:
ошибку линейной засечки точки О1 с исходных пунктов A и B (mO1), ошибку линейной засечки точки О2 с исходных пунктов B и C (mO2), ошибку линейной засечки точки P с точек О1 и О2 (mP),

Угол засечки г зависит от взаимного расположения линий BC и BA и углов в1 и в2; для рис. 11 этот угол вычисляется по формуле:
Для многих случаев практики достаточно считать, что истинное положение точки P находится внутри круга радиуса MP с центром в точке P. В строгой теории рассмотренный критерий называется радиальной ошибкой. Кроме того, в этой теории применяются и более сложные критерии, такие как «эллипс ошибок» (кривая 2-го порядка), «подера эллипса ошибок» (кривая 4-го порядка) и др. .
При количестве измерений n>2 (многократные засечки) точка P получается в пересечении n линий положения, соответствующих уравненным значениям измерений; полосы положения, пересекаясь, образуют 2 * n-угольник. Наибольшая ошибка положения точки P будет определяться расстоянием от точки P до самой удаленной от нее вершины этого многоугольника. Из рисунка 14-б понятна роль третьего измерения в уменьшении ошибки положения точки P; кстати, на этом рисунке второе измерение практически не влияет на значение ошибки положения точки.
Для определения широты необходимо при помощи треугольника опустить перпендикуляр из точки А на градусную рамку на линию широты и прочитать справа или слева по шкале широты, соответствующие градусы, минуты, секунды. φА= φ0+ Δφ
φА=54 0 36 / 00 // +0 0 01 / 40 //= 54 0 37 / 40 //
Для определения долготы необходимо при помощи треугольника опустить перпендикуляр из точки А на градусную рамку линии долготы и прочитать сверху или снизу соответствующие градусы, минуты, секунды.
Определение прямоугольных координат точки по карте
Прямоугольные
координаты точки (Х, У) по карте определяют
в квадрате километровой сетки следующим
образом: 
1. При помощи треугольника опускают перпендикуляры из точки А на линию километровой сетки Х и У снимаются значения ХА=Х0+ Δ Х; УА=У0+ Δ У
Например, координаты точки А равны: ХА= 6065км + 0,55 км = 6065,55 км;
УА= 4311 км + 0,535 км = 4311,535 км. (координата является приведенной);
Точка А расположена в 4-ой зоне, на что указывает первая цифра координаты у приведенной.
9. Измерение длин линий, дирекционных углов и азимутов по карте, определение угла наклона линии, заданной на карте.
Измерение длин
Чтобы
определить по карте расстояние между
точками местности (предметами, объектами),
пользуясь численным
масштабом,
надо измерить на карте расстояние между
этими точками в сантиметрах и умножить
полученное число на величину масштаба.
Небольшое
расстояние проще определить, пользуясь
линейным
масштабом.
Для этого достаточно циркуль-измеритель,
раствор которого равен расстоянию между
заданными точками на карте, приложить
к линейному масштабу и снять отсчет в
метрах или километрах.

Для измерения кривых - раствор «шаг» циркуля-измерителя устанавливают так, чтобы он соответствовал целому числу километров, и на измеряемом по карте отрезке откладывают целое число «шагов». Расстояние, не укладывающееся в целое число «шагов» циркуля-измерителя, определяют с помощью линейного масштаба и прибавляют к полученному числу километров.
Измерение дирекционных углов и азимутов на карте
.

Соединяем пункт 1 и 2. Измеряем угол. Измерение происходит с помощью транспортира, он располагается параллельно медиане, далее отчитывается угол наклона по часовой стрелке.
Определение угла наклона линии, заданной на карте.
Определение происходит точно по тому же принципу, что и нахождение дирекционного угла.
10. Прямая и обратная геодезическая задача на плоскости. При вычислительной обработке выполненных на местности измерений, а также при проектировании инженерных сооружений и расчетах для перенесения проектов в натуру возникает необходимость решения прямой и обратной геодезических задач.Прямая геодезическая задача. По известным координатамх 1 иу 1 точки 1, дирекционному углу 1-2 и расстояниюd 1-2 до точки 2 требуется вычислить ее координатых 2 ,у 2 .
|
|
Рис. 3.5. К решению прямой и обратной геодезических задач |

Координаты точки 2 вычисляют по формулам (рис. 3.5): (3.4) гдех ,у приращения координат, равные
![]() (3.5)
(3.5)
Обратная
геодезическая задача.
По известным
координатамх
1 ,у
1 точки 1 их
2 ,у
2 точки
2 требуется вычислить расстояние между
нимиd
1-2 и
дирекционный угол 1-2 .
Из формул (3.5) и рис. 3.5 видно, что.
(3.6) Для определения дирекционного
угла 1-2 воспользуемся функцией арктангенса.
При этом учтем, что компьютерные программы
и микрокалькуляторы выдают главное
значение арктангенса= ,
лежащее в диапазоне90+90,
тогда как искомый дирекционный уголможет иметь любое значение в диапазоне
0360.
,
лежащее в диапазоне90+90,
тогда как искомый дирекционный уголможет иметь любое значение в диапазоне
0360.
Формула перехода от кзависит от координатной четверти, в которой расположено заданное направление или, другими словами, от знаков разностейy =y 2 y 1 иx =х 2 х 1 (см. таблицу 3.1 и рис. 3.6).Таблица 3.1

Рис. 3.6. Дирекционные углы и главные значения арктангенса в I,II,IIIиIVчетвертях
Расстояние между точками вычисляют по формуле
(3.6)
или другим путем – по формулам![]() (3.7)
(3.7)
Программами решения прямых и обратных геодезических задач снабжены, в частности, электронные тахеометры, что дает возможность непосредственно в ходе полевых измерений определять координаты наблюдаемых точек, вычислять углы и расстояния для разбивочных работ.
- Чтобы найти координаты точки пересечения графиков функций нужно приравнять обе функции друг к другу, перенести в левую часть все члена, содержащие $ x $, а в правую остальные и найти корни, полученного уравнения.
- Второй способ заключается в том, что нужно составить систему уравнений и решить её путём подстановки одной функции в другую
- Третий способ подразумевает графическое построение функций и визуальное определение точки пересечения.
Случай двух линейных функций
Рассмотрим две линейные функции $ f(x) = k_1 x+m_1 $ и $ g(x) = k_2 x + m_2 $. Эти функции называются прямыми. Построить их достаточно легко, нужно взять любые два значения $ x_1 $ и $ x_2 $ и найти $ f(x_1) $ и $ (x_2) $. Затем повторить тоже самое и с функцией $ g(x) $. Далее визуально найти координату точки пересечения графиков функций.
Следует знать, что линейные функции имеют только одну точку пересечения и только тогда, когда $ k_1 \neq k_2 $. Иначе, в случае $ k_1=k_2 $ функции параллельны друг другу, так как $ k $ - это коэффициент угла наклона. Если $ k_1 \neq k_2 $, но $ m_1=m_2 $, тогда точкой пересечения будет $ M(0;m) $. Это правило желательно запомнить для ускоренного решения задач.
| Пример 1 |
| Пусть даны $ f(x) = 2x-5 $ и $ g(x)=x+3 $. Найти координаты точки пересечения графиков функций. |
| Решение |
|
Как это сделать? Так как представлены две линейные функции, то первым делом смотрим на коэффициент угла наклона обеих функций $ k_1 = 2 $ и $ k_2 = 1 $. Замечаем, что $ k_1 \neq k_2 $, поэтому существует одна точка пересечения. Найдём её с помощью уравнения $ f(x)=g(x) $: $$ 2x-5 = x+3 $$ Переносим слагаемые с $ x $ в левую часть, а остальные в правую: $$ 2x - x = 3+5 $$ Получили $ x=8 $ абциссу точки пересечения графиков, а теперь найдём ординату. Для этого подставим $ x = 8 $ в любое из уравнений хоть в $ f(x) $, либо в $ g(x) $: $$ f(8) = 2\cdot 8 - 5 = 16 - 5 = 11 $$ Итак, $ M (8;11) $ - является точкой пересечения графиков двух линейных функций. Если не получается решить свою задачу, то присылайте её к нам. Мы предоставим подробное решение. Вы сможете ознакомиться с ходом вычисления и почерпнуть информацию. Это поможет своевременно получить зачёт у преподавателя! |
| Ответ |
| $$ M (8;11) $$ |
Случай двух нелинейных функций
| Пример 3 |
| Найти координаты точки пересечения графиков функций: $ f(x)=x^2-2x+1 $ и $ g(x)=x^2+1 $ |
| Решение |
|
Как быть с двумя нелинейными функциями? Алгоритм простой: приравниваем уравнения друг к другу и находим корни: $$ x^2-2x+1=x^2+1 $$ Разносим по разным сторонам уравнения члены с $ x $ и без него: $$ x^2-2x-x^2=1-1 $$ Найдена абцисса искомой точки, но её недостаточно. Ещё нехватает ординаты $ y $. Подставляем $ x = 0 $ в любое из двух уравнений условия задачи. Например: $$ f(0)=0^2-2\cdot 0 + 1 = 1 $$ $ M (0;1) $ - точка пересечения графиков функций |
| Ответ |
| $$ M (0;1) $$ |