В чем заключается метод линеаризации системы мти. Метод гармонической линеаризации
Дифференциальные уравнения можно линеаризовать следующими методами:
1. нелинейная функция рабочей области раскладывается в ряд Тейлора.
2. Заданные в виде графов нелинейные функции линеаризуются в рабочей плоскости прямыми.
3. Вместо непосредственного определения частных производных, вводятся переменные в исходные нелинейные уравнения.
 ,
,
 .
(33)
.
(33)
4. Данный метод основан на определении коэффициентов по методу наименьших квадратов.
 ,
(34)
,
(34)
где
 - постоянное времени пневмопривода;
- постоянное времени пневмопривода;
 - передаточный
коэффициент пневмопривода;
- передаточный
коэффициент пневмопривода;
 - коэффициент
демпфирования пневмопривода.
- коэффициент
демпфирования пневмопривода.
Внутреннее строение элементов САР наиболее просто определяется с помощью структурных схем графов. В отличие от известных структурных схем в графах, переменные указываются в виде времени, а дуги обозначают или параметры, или передаточные функции типовых звеньев. Между ними существует четное соотношение.
![]()
![]()
![]()
![]()
![]()


Мм нелинейных элементов
Рассмотренные в первой главе методы линеаризации применимы, когда нелинейность, входящая в объект ЛСА, хотя бы один раз дифференцируема или аппроксимируется касательной с малой погрешностью некоторой окрестности близкой к рабочей точке. Существует целый класс нелинейностей, для которых оба условия не выполняются. Обычно это существенные нелинейности. К ним относятся: ступенчатые, кусочно-линейные и многозначные функции с точками разрыва первого рода, а также степенные и транстендентые функции. Использование УВМ, обеспечивающих выполнение логико-алгебраических операций в системах привело к новым типам линейностей, которые представляют через непрерывные переменные с помощью специальной логики.
Для математического описания таких нелинейностей применяют эквивалентные передаточные функции, зависящие от коэффициентов линеаризации, которые получают путем минимизации среднего квадрата ошибки воспроизведения заданного входного сигнала. Форма входных сигналов, поступающих на вход нелинейностей может быть произвольна. На практике наиболее распространение получили гармонические и случайные виды входных сигналов и их временные комбинации. Соответственно и методы линеаризации называются гармоническими и статическими.
Общий метод описания эквивалентных передаточных функций нэ
Весь класс
существенных нелинейностей разделены
на две группы. К первой группе относится
однозначные нелинейности, у которых
связь между входными
 и выходными
и выходными векторными сигналами зависит только
от формы статической характеристики
нелинейности
векторными сигналами зависит только
от формы статической характеристики
нелинейности .
.
 .
.

В этом случае, при определенной форме входных сигналов:
 .
.
С помощью матрицы
линеаризации
 можно найти приближенное значение
выходных сигналов:
можно найти приближенное значение
выходных сигналов:
 .
.
Из (42) следует, что матрица коэффициентов линеаризации однозначных нелинейностей, является действительными величинами и их эквивалентные передаточные функции:
 .
.
Ко второй группе относят двузначные (многозначные) нелинейности, у которых связь между входными и выходными сигналами зависит не только от формы статической характеристики, но так же определяется предысторией входного сигнала. В этом случае выражение (42) запишется в виде:

 .
.
Для учета влияния
предыстории входного периодического
сигнала будем учитывать не только сам
сигнал
 ,
но и скорость его изменения, дифференциал
,
но и скорость его изменения, дифференциал .
.
При входных сигналах:
 приближенное
значение входного сигнала будет:
приближенное
значение входного сигнала будет:
где
 и
и - коэффициенты гармонической линеаризации
двухзначных нелинейностей;
- коэффициенты гармонической линеаризации
двухзначных нелинейностей;
 - период колебания
по правой гармонике;
- период колебания
по правой гармонике;
 - гармоническая
функция.
- гармоническая
функция.
Эквивалентная передаточная функция:
Существуют нелинейности более общего вида:
 ,
,
 ,
,
где
 и
и - коэффициенты гармонической линеаризации;
- коэффициенты гармонической линеаризации;
 - номер гармоники.
- номер гармоники.
Матрицы коэффициентов
линеаризации периодической с периодом
 .
Имея это ввиду, передаточную функцию
двух двухзначной нелинейности можно
представить по аналогии с передаточной
функцией
.
Имея это ввиду, передаточную функцию
двух двухзначной нелинейности можно
представить по аналогии с передаточной
функцией
Пользуясь определим обобщенную формулу для вычисления передаточной функции однозначных и двухзначных нелинейностей.
В случае однозначной
нелинейности матрица коэффициентов
линеаризации
 ,
зависящей от параметров вектора
,
зависящей от параметров вектора ,
выберем, таким образом, чтобы линеаризовать
среднее значение квадрата разности
между точным
,
выберем, таким образом, чтобы линеаризовать
среднее значение квадрата разности
между точным и приближенным
и приближенным сигналами на входе:
сигналами на входе:
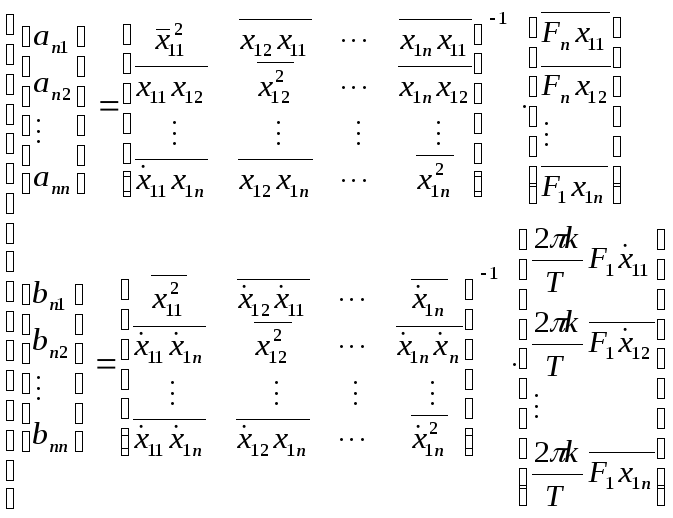
После преобразований,
упрощений, ухищрений и усиления
бдительности, получим эквивалентную
передаточную функцию в виде системы
матриц:
 ,
, .
.
 ,
,
при
 ,
, .
.
 .
.
Определить коэффициент линеаризации для однозначной нелинейности. Когда на ее вход поступает первая гармоника синусоидального сигнала:
где
 .
.
 .
.
Уравнение (56)
представляет собой коэффициент
линеаризации по первой гармонике для
однозначной нелинейности, она определяет
эквивалентную передаточную функцию
 .
.
В дальнейшем сравнение формулы для определения коэффициентов линеаризации простейших нелинейностей при подаче на их вход периодических сигналов: синусоидального, треугольного, покажем целесообразность применения получаемых эквивалентных передаточных функций.
Коэффициент
линеаризации определим
 ,
, .
.
 ,
,
 .
.
Пример. Определить коэффициент линеаризации двузначной нелинейности, когда на ее вход поступает первая гармоника синусоидального сигнала и имеет один вход. Из системы матриц (60), получим:
 ,
,
 .
.
В данном примере входной сигнал запишем в виде:
 ,
,
 .
.
Когда для двузначной нелинейности общая эквивалентная функция:
 .
.
.
.
Большинство реальных систем нелинейны, т.е. поведение системы описывается уравнениями:
Часто на практике нелинейные системы можно аппроксимировать линейной в некоторой ограниченной области.
Предположим,
что
 для уравнения (1) известно. Заменим
систему (1,2) подставив начальные условия
для уравнения (1) известно. Заменим
систему (1,2) подставив начальные условия

Предполагаем,
что начальные состояния и входная
переменная
 изменены так, что новое состояние и
входная переменная
изменены так, что новое состояние и
входная переменная
 имеет
следующий вид.
имеет
следующий вид.

Выход
 найдем в результате решения возмущенных
уравнений.
найдем в результате решения возмущенных
уравнений.

Разложим правую часть в ряд Тейлора.
 -остаточный
член погрешности второго порядка
малости.
-остаточный
член погрешности второго порядка
малости.
Вычитая исходное решение из разложений, получаем следующие линеаризованные уравнения:

 .
.
Частные производные обозначим как коэффициенты зависящие от времени
Эти выражения можно переписать в виде


Получим
линеаризованные уравнения в точках
равновесия .
.
 .
В точке
.
В точке
Решение этого уравнения

Продифференцируем правую часть исходного уравнения по x , получим
 .
.
Выполним
линеаризацию уравнения для произвольного
начального значения .
.
Получаем линеаризованную систему в виде нестационарного уравнения
Решение линеаризованной системы имеет вид:
 .
.
1.7. Типовые возмущающие воздействия
Внешние возмущающие воздействия могут иметь различный характер:
мгновенного действия виде импульса и постоянного действия.
Если
продифференцировать во времени
 , то
, то , следовательно(t)-
функция представляет собой производную
во времени единичного ступенчатого
воздействия.
, следовательно(t)-
функция представляет собой производную
во времени единичного ступенчатого
воздействия.
(t)- функция при интегрировании обладает следующими фильтрующими свойствами:
Интегрируемое
произведение произвольной функции
 и(t)-
функции отфильтровывает из всех значений
и(t)-
функции отфильтровывает из всех значений
 только то, которое соответствует моменту
приложение мгновенного единичного
импульса.
только то, которое соответствует моменту
приложение мгновенного единичного
импульса.
|
Линейное возмущение |
Гармоническое возмущение
|

2 U. Системы второго порядка
2.1.Приведение уравнений второго порядка к системам уравнений первого порядка
Пример линейной стационарной системы.
Другое описание этой же системы второго порядка дается парой связанных дифференциальных уравнений первого порядка
 (2)
(2)
где связь между коэффициентами этих уравнений определяется следующими соотношениями

2.2. Решение уравнений второго порядка
Применяя
дифференциальный оператор
 уравнение можно представить в более
компактном виде
уравнение можно представить в более
компактном виде
Решается уравнение (1) в 3 этапа:
1)
находим общее решение
 однородного
уравнения;
однородного
уравнения;
2)
находим частное решение
 ;
;
3)
полное решение есть сумма этих двух
решений
 .
.
Рассматриваем однородное уравнение
будем искать решение в форме
 (5)
(5)
где
 действительная
или комплексная величина. При подстановке
(5) в (4) получаем
действительная
или комплексная величина. При подстановке
(5) в (4) получаем
 (6)
(6)
Это выражение является решением однородного уравнения, если s удовлетворяет характеристическому уравнению
При s 1 s 2 решение однородного уравнения имеет вид
Тогда
ищем решение в виде
 и подставляя его в исходное уравнение
и подставляя его в исходное уравнение
Откуда
следует, что
 .
.
Если выбрать
 .
(8)
.
(8)
Частное
решение исходного уравнения (1) ищем
методом вариации
 в форме
в форме

исходя из (11), (13) получаем систему

Полное решение уравнения.

Заменой переменных получим уравнение второго порядка:

ФАЗОВАЯ ПЛОСКОСТЬ
Двумерным пространственным состоянием или фазовой плоскостью называется плоскость, в которой две переменные состояния рассматриваются в прямоугольной системе координат
 -
эти переменные состояния образуют
вектор
-
эти переменные состояния образуют
вектор
 .
.
График
изменения образует
траекторию движения. Необходимо указать
направление движения траектории.
образует
траекторию движения. Необходимо указать
направление движения траектории.
Состояние
равновесия называется такое состояние
 ,
в котором система остается при условии,
что
,
в котором система остается при условии,
что Состояние равновесия можно определить
(если оно существует) из соотношений
Состояние равновесия можно определить
(если оно существует) из соотношений

при любом t .
Состояния равновесия иногда называются критическими, основными или нулевыми точками.
Траектории системы не могут пересекаться друг с другом в пространстве, что вытекает и единственности решения дифференциального уравнения.
Ни
одна траектория не проходит через
состояние равновесия хотя и могут сколь
угодно близко приближаться к особым
точкам (при
 )
.
)
.
Типы точек
1 Регулярная точка есть любая точка, через которую может проходить траектория, точка равновесия не является регулярной.
2.Точка равновесия изолирована, если в ее малой окрестности содержатся только регулярные точки.
Рассмотрим систему

Для определения состояния равновесия решим следующую систему уравнений
 .
.
Получаем
зависимость между переменными состояния
 .
.
любая точка которой есть состояние равновесия. Эти точки не является изолированными.
Заметим, что для линейной стационарной системы

начальное
состояние оказывается состоянием
равновесия и изолированным, если
детерминант матрицы коэффициентов
 ,
тогда
,
тогда есть состояние равновесия.
есть состояние равновесия.
Для
нелинейной системы второго порядка
состояние равновесия
 называется
простым
,
если соответствующая матрица Якоби не
равна 0.
называется
простым
,
если соответствующая матрица Якоби не
равна 0.

В противном случае состояние не будет простым. Если точка равновесия является простой, то она изолирована. Обратное утверждение не обязательно верно (за исключением случая линейных стационарных систем) .
Рассмотрим
решение уравнения состояния для линейной
системи второго порядка:
 .
.
Эту систему можно представить двумя уравнениями первого порядка,
обозначим
 ,
,

Характеристическое
уравнение
 и решение будет следующим:
и решение будет следующим:

Решение уравнения записывается в виде

Правила ввода функций:
- Все переменные выражаются через x 1 ,x 2
- Все математические операции выражаются через общепринятые символы (+,-,*,/,^). Например, x 1 2 +x 1 x 2 , записываем как x1^2+x1*x2 .
Все рассматриваемые ниже методы основываются на разложении нелинейной функции общего вида f(x) в ряд Тейлора до членов первого порядка в окрестности некоторой точки x 0:
где ![]() – отбрасываемый член второго порядка малости.
– отбрасываемый член второго порядка малости.
Таким образом, функция f(x) аппроксимируется в точке x 0 линейной функцией:
,
где x 0 – точка линеаризации.
Замечание
. Линеаризацию следует использовать с большой осторожностью, поскольку иногда она дает весьма грубое приближение.
Общая задача нелинейного программирования
Рассмотрим общую задачу нелинейного программирования:
Пусть x t – некоторая заданная оценка решения. Использование непосредственной линеаризации приводит к следующей задаче:

Эта задача представляет собой ЗЛП. Решая ее, находим новое приближение x t +1 , которое может и не принадлежать допустимой области решений S.
Если , то оптимальное значение линеаризованной целевой функции, удовлетворяющее неравенству:
может не быть точной оценкой истинного значения оптимума.
Для сходимости к экстремуму достаточно, чтобы для последовательности точек { x t }, полученных в результате решения последовательности подзадач ЛП, выполнялось следующее условие:
значение целевой функции и невязки по ограничениям в точке x t +1 должно быть меньше их значений в точке x t .
Пример №1
.

Построим допустимую область S (см. рис.).

Допустимая область S состоит из точек кривой h(x)=0, лежащей между точкой (2;0), определяемой ограничением x 2 ≥0, и точкой (1;1), определяемой ограничением g(x) ≥0.
В результате линеаризации задачи в точке x 0 =(2;1) получаем следующую ЗЛП:

Здесь представляет собой отрезок прямой , ограниченный точками (2.5; 0.25) и (11/9; 8/9). Линии уровня линеаризованной целевой функции представляют собой прямые с наклоном -2, тогда как линии уровня исходной целевой функции – окружности с центром в точке (0;0). Ясно, что решением линеаризованной задачи является точка x 1 =(11/9; 8/9). В этой точке имеем:

так что ограничение–равенство нарушается. Произведя новую линеаризацию в точке x 1 , получаем новую задачу:

Новое решение лежит на пересечении прямых ![]() и и имеет координаты x 2 =(1.0187; 0.9965). Ограничение– равенство (
и и имеет координаты x 2 =(1.0187; 0.9965). Ограничение– равенство (![]() ) все еще нарушается, но уже в меньшей степени. Если произвести еще две итерации, то получим очень хорошее приближение к решению x * =(1;1), f(x *)=2
) все еще нарушается, но уже в меньшей степени. Если произвести еще две итерации, то получим очень хорошее приближение к решению x * =(1;1), f(x *)=2
Таблицa - Значения целевой функции для некоторых итераций:
| Итерация | f | g | h |
| 0 | 5 | 3 | –1 |
| 1 | 2,284 | 0,605 | –0,0123 |
| 3 | 2,00015 | 3,44×10 -4 | –1,18×10 -5 |
| Оптимум | 2 | 0 | 0 |
Из таблицы видно, что значения f,g и h монотонно улучшаются. Однако такая монотонность характерна для задач, функции которых являются "умеренно" нелинейными. В случае функций с ярко выраженной нелинейностью монотонность улучшения нарушается и алгоритм перестает сходиться.
Существует три способа усовершенствования методов непосредственной линеаризации:
1. Использование линейного приближения для отыскания направления спуска.
2. Глобальная аппроксимация нелинейной функции задачи при помощи кусочно–линейчатой функции.
3. Применение последовательных линеаризаций на каждой итерации для уточнения допустимой области S.
Статистическое исследование нелинейных систем представляет собой весьма сложную задачу. Сравнительная простота методов статистического анализа линейных систем является естественной причиной попыток распространить эти методы на задачи приближенного исследования точности нелинейных систем. Так возникли методы линеаризации нелинейных характеристик систем.
Простейшим видом линеаризации нелинейных систем является линеаризация при помощи разложения всех нелинейных функций, входящих в уравнения системы, в ряд Тейлора и отбрасывание всех членов ряда выше первой степени. При этом каждая входящая в уравнение системы нелинейная функция заменяется приближенным линейным выражением
где - математическое ожидание случайной функции х.
Формула вида (XVII.1) позволяет лйнеаризовать уравнения нелинейной системы относительно флюктуаций сигналов в различных элементах системы. Это дает возможность применять для приближенного исследования точности нелинейных систем методы статистической теории линейных систем. Однако формулы вида (XVII. 1) применимы только к непрерывным функциям, имеющим непрерывные производные по аргументу в области его практически возможных значений.
Между тем системы автоматического регулирования часто содержат существенно нелинейные звенья, характеристики которых разрывны или имеют разрывные производные. К таким характеристикам можно отнести релейные характеристики, ограниченные зоны линейности и т. д. (см. кн. 1 гл. IV). Для линеаризации таких характеристик был развит метод статистической линеаризации , .
Статистическая линеаризация представляет собой замену нелинейного звена линейным относительно флюктуаций звеном с сохранением в определенном смысле уровня полезного сигнала и уровня флюктуаций на выходе. При этом нелинейная функция аппроксимируется постоянным эквивалентным линейным коэффициентом усиления. Естественно, что аппроксимация нелинейных функций постоянным коэффициентом недостаточно полно
отражает физическую картину преобразования случайного сигнала, так как не учитывается преобразование спектра сигнала нелинейным звеном. В связи с этим в работе была предложена аппроксимация безынерционных нелинейных звеньев статистически эквивалентной передаточной функцией, определяемой из отношения спектральной плотности сигнала на выходе нелинейного звена к спектральной плотности сигнала на входе.
Одновременно с этим была развита статистическая линеаризация нелинейных функций при условии, когда входной сигнал содержит периодическую составляющую. Этот метод в дальнейшем получил название совместной статистической и гармонической линеаризации.
Названные методы линеаризации позволяют свести систему нелинейных дифференциальных уравнений к системе линейных, эквивалентных исходной по первым двум моментам случайной функции. Следовательно, используя метод статистической линеаризации, можно определить лишь среднее значение и дисперсию случайной функции. При использовании совместной линеаризации можно определить так же первую гармонику периодических колебаний в нелинейной системе.
В связи с тем, что в нелинейной системе функция плотности вероятности случайного сигнала может существенным образом отличаться от нормальной и при этом для характеристики точности работы знание лишь первых двух моментов не является достаточным в работе 113], был развит метод обобщенной статистически эквивалентной передаточной функции, основанный на разложении в ряд по ортогональным полиномам Чебышева - Эрмита случайных функций и позволяющий определить высшие моменты этих функций в нелинейной системе.
Основная идея метода статистической линеаризации , заключается в аппроксимации существенно нелинейных преобразований линеаризованной зависимостью, эквивалентной нелинейному преобразованию по первым двум моментам случайных функций, т. е. по среднему значению и дисперсии. Разумеется, что эта эквивалентная линеаризованная зависимость имеет различный вид для разных существенно нелинейных элементов, а также зависит от вероятностных характеристик случайного сигнала на входе нелинейного элемента.
Рассмотрим нелинейное преобразование, соответствующее реальной статической характеристике безынерционного нелинейного элемента
Преобразуемый случайный процесс может быть представлен в виде
где математическое ожидание, а процесс с нулевым математическим ожиданием.
Представим сигнал на выходе нелинейного элемента в виде эквивалентного линейного преобразования входного сигнала
где К - эквивалентные статистические передаточные коэффициенты по математическому ожиданию и дисперсии, которые необходимо определить. Первое предположение, являющееся исходным при определении этих коэффициентов, - это соблюдение равенств математического ожидания и дисперсии для случайного сигнала на выходе реального нелинейного и эквивалентного линейного элементов. Тогда коэффициент может быть определен как отношение математического ожидания на выходе нелинейного элемента к математическому ожиданию сигнала на входе
Для коэффициента в этом случае будем иметь выражение

где - средние квадратические отклонения центрированных случайных сигналов соответственно на входе и на выходе нелинейного элемента.
Второе предположение, принимаемое при статистической линеаризации, основано на требовании минимума среднего квадрата разности между случайным сигналом на выходе нелинейного элемента и случайным сигналом на выходе эквивалентного линейного элемента. Это условие можно записать следующим образом:
Раскроем это выражение:
В формуле (XVI 1.8) черта сверху означает математическое ожидание. Взяв частные производные от выражения (XVI 1.8) по получим

где - взаимная корреляционная функция сигналов на входе и на выходе эквивалентного линейного элемента при
Использование при расчетах коэффициента (XVI 1.6) дает несколько завышенное значение дисперсии, а использование коэффициента (XVI 1.9) несколько заниженное. Поэтому при расчетах в качестве эквивалентного коэффициента по случайной составляющей можно взять следующее значение:
![]()
Заметим, что при статистической линеаризации в отличие от обычной линеаризации нелинейных функций, основанной на их разложении в ряд Тейлора в окрестности некоторой рабочей точки, средние характеристики сигналов могут быть рассчитаны точно.
Теперь рассмотрим общие формулы для определения эквивалентных коэффициентов усиления. Пусть задана одномерная нормальная плотность вероятности). Тогда формулы для коэффициентов будут иметь вид

Произведем расчет коэффициентов по формулам (XVII. 11), (XVII.12) и (XVII.13) для нелинейной характеристики типа кубической параболы, которая аналитически может быть представлена формулой
Метод линеаризации операторов с точки зрения изложенной в предыдущих главах общей теории случайных функций может быть применен в двух различных вариантах. Во-первых, можно непосредственно линеаризовать заданную зависимость между случайными функциями и заменить таким образом нелинейные уравнения, связывающие случайные функции, линейными. Во-вторых, можно применить метод канонических разложений, который приводит к замене операций над случайными функциями операциями над обычными случайными величинами, после чего можно применить обычный в теории вероятностей метод линеаризации функциональных зависимостей между случайными величинами.
Метод непосредственной линеаризации преобразования случайных функций состоит в замене всех заданных уравнений, связывающих случайные функции, приближенными линейными уравнениями, достаточно хорошо отражающими истинную зависимость между случайными функциями в области практически возможных реализаций случайных функций. Так как математические ожидания случайных величин
являются средними значениями, около которых рассеиваются их возможные реализации, то практически удобнее всего производить линеаризацию соотношений между случайными функциями относительно их отклонений от математических ожиданий, т. е. центрированных случайных функций. При этом все функции, входящие в заданные уравнения, следует разложить в ряды Тейлора по центрированным случайным функциям и отбросить члены этих рядов выше первой степени. Степень точности получаемого таким образом приближения может быть оценка по максимальной возможной величине отброшенных членов в области практически возможных реализаций случайных функций. Заменив данные уравнения, связывающие случайные функции, приближенными линейными уравнениями, мы можем применить изложенную в предыдущей главе теорию линейных преобразований случайных функций для приближенного определения математических ожиданий и корреляционных функций случайных функций, полученных в результате рассматриваемого нелинейного преобразования. В следующем параграфе мы дадим более подробное изложение метода непосредственной линеаризации в применении к случайным функциям скалярной независимой переменной, связанным обыкновенными дифференциальными уравнениями.
Перейдем к применению метода канонических разложений к приближенному исследованию нелинейных преобразований случайных функций. Предположим, что случайная функция получается в результате преобразования случайной функции при помощи некоторого нелинейного оператора А:
![]()
Подставляя сюда вместо случайной функции какое-либо ее каноническое разложение, получим:
Это равенство представляет случайную функцию как некоторую, вообще говоря нелинейную, функцию случайных величин в которую аргумент 5 входит как параметр:
Линеаризуя эту функцию обычным в теории вероятностей способом (см. § 31) и принимая во внимтние, что математические ожидания величин равны нулю, будем иметь:
есть значение производной функции по случайной величине при нулевых значениях всех величин что и отмечено нуликом внизу у квадратной скобки. Формула (100.5) дает приближенное каноническое разложение случайной функции с коэффициентами разложения и координатными функциями
Принимая во внимание, что математические ожидания всех величин равны нулю, получим из (100.5) следующую приближенную формулу для математического ожидания случайной функции
Таким образом, для приближенного определения математического ожидания случайной функции следует в соотношении (100.1), связывающем случайные функции и заменить эти случайные функции их математическими ожиданиями Это правило вполне аналогично правилу приближенного определения математического ожидания случайной величины, связанной с другой случайной величиной нелинейной функциональной зависимостью, выведенному в § 31.
Корреляционная функция случайной функции на основании общей формулы (56.2), выразится приближенной формулой










